PlotJuggler
Fast, intuitive and extensible
time series visualization tool.

Visualize data intuitively
Its Drag & Drop interface is designed to maximize both simplicity and speed.
PlotJuggler is perfect to visualize logs, off-line and real-time data, and it can be used in multiple fields, including:
Robotics, autonomous vehicles and drones
Data Science
Automation
Embedded systems
Real-time streaming
PlotJuggler can be connected to an external application using any inter-process communication and display data in real-time.
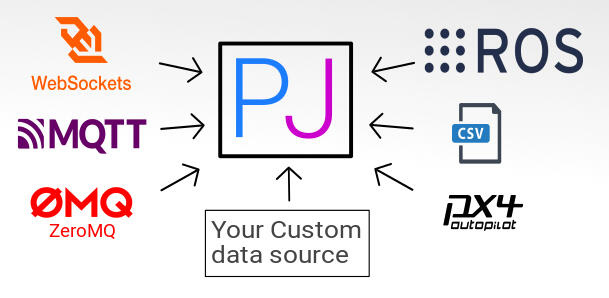
Multiple Data Sources
Thanks to its plugin-based architecture, it is easy to add new data sources and functionalities.
If needed, you can easily add your own transport layer and/or protocol.
Plotjuggler is fully compatible with ROS and ROS2.
It can read CSV files or ULogs (PX4).
It can connect to live-streaming through MQTT, ZeroMQ or Websockets.
Its supported protocols include JSON, BSON, CBOR or MessagePack.
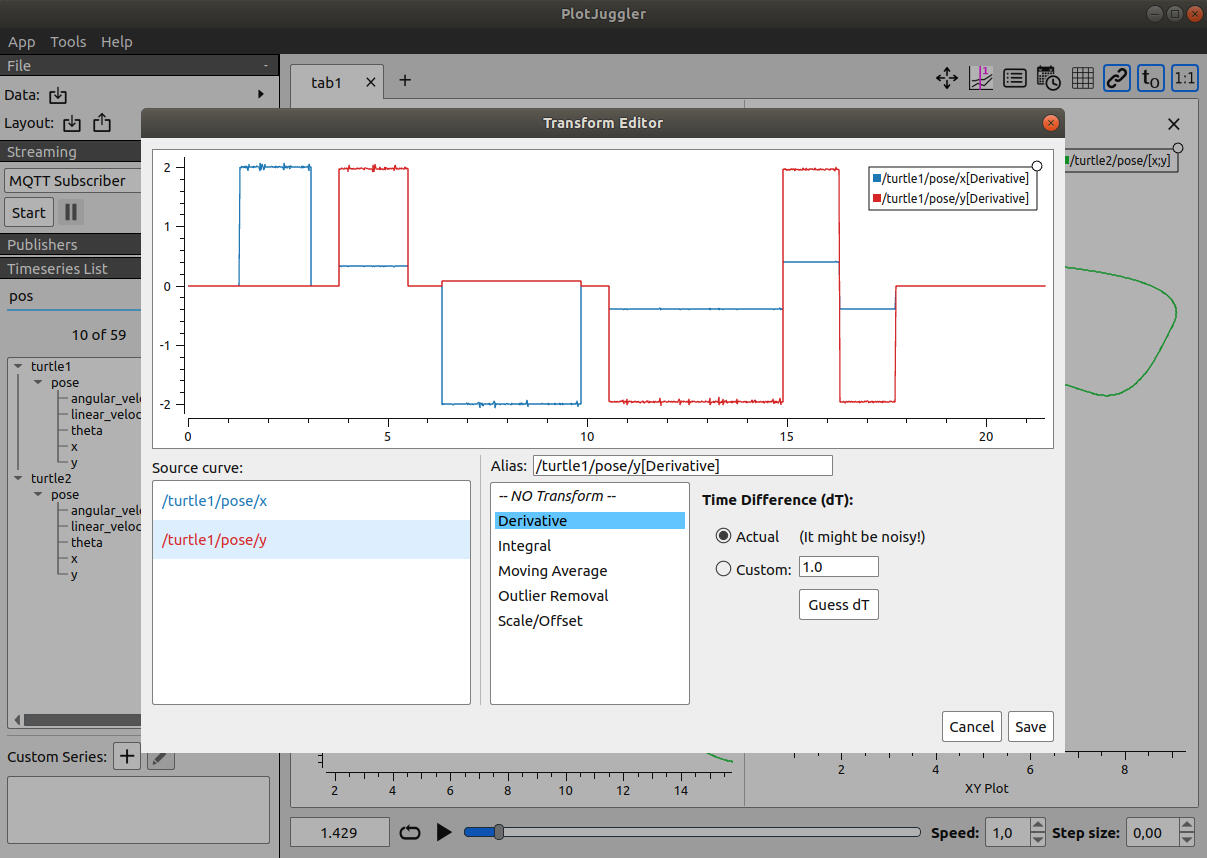
Understand your data
You can apply functions and transformations to your time series, to better understand your data.PlotJuggler offers:- Built-in Transformations: Derivative, Integral, Moving Average, Scale, etc.
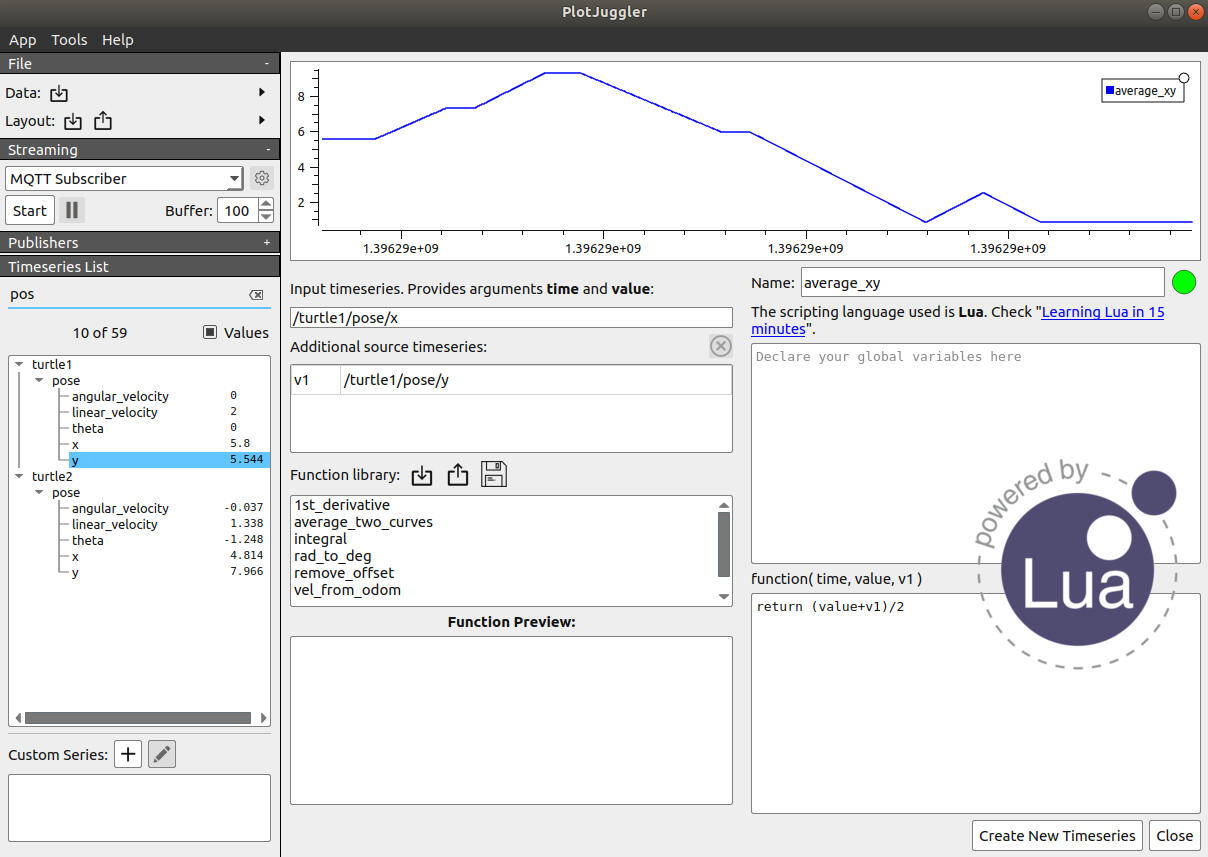
- A super-simple Function Editor, based on the Lua scripting language, to design more complex equations.
Testimonials
"PlotJuggler is an indispensable tool. Hands down, it has saved us countless hours of debugging, enabled us to communicate with each other and vendors more effectively"
Charles Brian Quinn, Greenzie
"PlotJuggler has joined the ranks of gdb and valgrind as one of our indispensable debugging tools, allowing us to find problems that are extremely difficult to see with traditional instruments"
Víctor López, Pal Robotics
* "PlotJuggler has made it very easy to analyse complex data from our robots, and highlight details we would have missed with more conventional tools like a rqt_plot or Matlab"*
Robin Vanhove, iXblue
"PlotJuggler is a tool that saved me days of debugging of complex robotics systems. If you don't use PlotJuggler in your workflow you are missing out"
ROS Integration
PlotJuggler works seamlessly with both ROS and ROS2.
- Load rosbags
- Subscribe to topics.
- Re-publish messages and visualize them in RViz.
Open Source
Built primarily by Davide Faconti, PlotJuggler is first and foremost a work of love.If you enjoy using PlotJuggler, consider supporting its development and become a Github Sponsor.
Commercial Support
If you need to extend any of the functionalities of PlotJuggler to cover a specific need or to parse your custom data formats, you can get commercial support from Davide Faconti.